-
SailBot

The goal of this project was to improve upon the 5 prior iterations of SailBot, the autonomous robotic sailboat maintained by WPI. This was accomplished by improving the mechanical, electrical, and software systems already in place, as well as adding new systems. Our overall objective for this iteration is to increase the rigidity and reliability of the vehicle.
The system improvements were influenced by the International Robotics Sailing Regatta (IRSR) rules, to ensure that the vessel would be a formidable competitor in the SailBot regatta hosted in June of 2022.
I worked on this in a team of eight engineers. Our goal was to improve these systems in order to complete the following IRSR events:
• Remote-controlled fleet race
• Autonomous endurance/long distance event
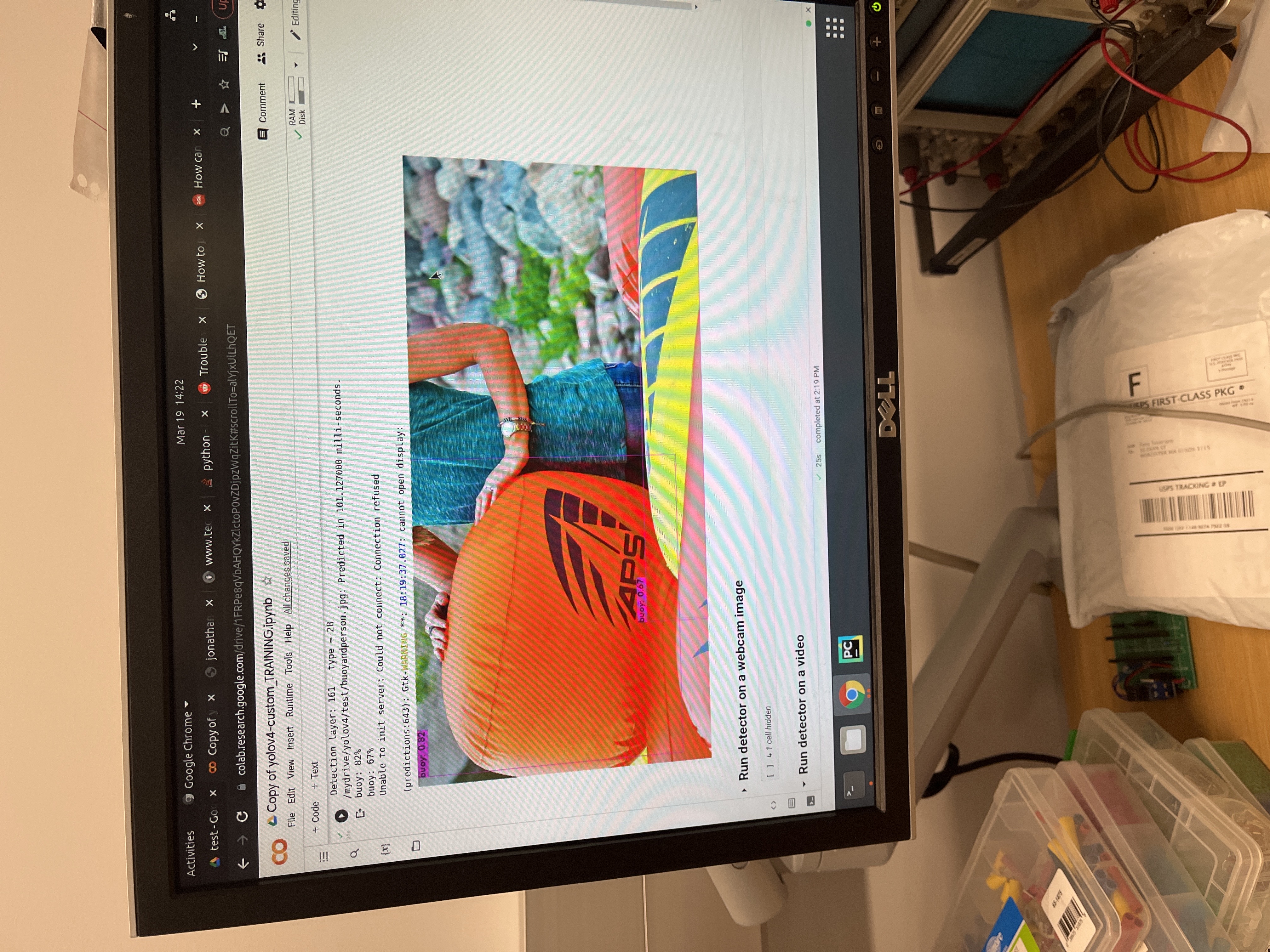
• Collision avoidance (computer vision, autonomous)
• Precision navigation (GPS positioning, computer vision)
• Station keeping
• Object search and location (computer vission, autonomous)
At the end of this project, we had successfully built and installed a new rigid wingsail, restored electrical systems in the hull (including bluetooth comms and a magnetic ON/OFF switch), re-geared and tested the ballast assembly, written and tested our autonomous sailing algorithms, and trained a YOLOv4 computer vision system for finding buoys and other boats.
Tech Stack: NVIDIA Jetson, ROS2 (Robot Operating System), Python, ZED SDK for JetPack 6.1
Full Report: https://digital.wpi.edu/pdfviewer/cv43p1245

 IMG_4467.JPG)
